Day3 Schedule
8:00 Conference room open, check-in (bring your name tag from Day1)
8:30 Presentations (presenters should join zoom, mute and deafen their PCs)
- 8:30 Leonard Hall
- 9:30 Sunohara & Shibuya・・・Indoor Flight
- 10:00 Sotani-san・・・EAMS update
- 10:30 Thomas Watson (lightning talk!)・・・ESP32 Status Update
- 11:00 Matt Kear & Ferruccio Vicari (Remote)・・・Autorotation Flight Mode Update
- 11:30 Rafael Lehmkuhl・・・Cockpit: An intuitive and customizable GCS
- 12:00 Peter Hall・・・Telemetry Dashboard
- 12:30 Ryan Freedman・・・ROS2
- 13:00 Randy Mackay・・・Position Offsets
- 13:30 Bill Geyer・・・System Identification WebTool (30 min)
- 14:00 Peter Hall, Matt Kear・・・Closing remarks
11:30 Bento lunch available (eat as you listen to presentations)
15:00 Demonstrations at Kenko Green Park
17:00 Indoor Demonstrations at Kaga Gymnasium
18:00 Dinner at Izakaya, Soba or Sushi (your choice!)
Leonard Hall Multirotor Basic Stability Tests

He explained a series of tests for stability and performance evaluation of multirotor aircraft, including evaluation of flight behavior under various conditions, such as limit angles, maximum speed and braking, ascent and descent, slang payload, motor stop, wind influence, etc. These tests are designed to ensure safety and reliability, and it is particularly important to understand the effects of weight and payload.
Sunohara & Shibuya Indoor Flight
“Quick Indoor,” developed by Drone Japan, was introduced as a solution for indoor drone flight. This drone, which utilizes “Modal AI” technology, is suitable for monitoring and inspection in factories and warehouses, and is equipped with vibration countermeasures, a function to switch to an Optical Flow sensor, and improved accuracy, and is capable of autonomous flight on a 2D map.
Sotani-san EAMS update
He touched on Japan’s drone regulations and the level of flight beyond visual line of sight in uninhabited and populated areas, and introduced the introduction of remote ID and a collision avoidance system between drones using Bluetooth/Wi-Fi. He also mentioned Japan’s unique licensing and certification requirements, and showed that development of a DA system aimed at improving collision avoidance and stability is underway as drones are increasingly used in logistics and patrols.
Thomas Watson (lightning talk!) ESP32 Status Update

M5stack has released a tiny drone equipped with the ESP32-S3. The ESP32 is cheaper and more convenient than the STM32, making it suitable for hobbyist use, but optimization was required due to limitations in speed and performance. Although various issues arose, such as the IMU update cycle and OS, stable flight was achieved. Future improvements are being considered, such as the addition of a GPS and compass, as well as the ability to upload custom configurations.
Matt Kear & Ferruccio Vicari (Remote) Autorotation Flight Mode Update

Explains helicopter autorotation (emergency gliding landing). Technology that adjusts blade angle to manage energy so that the helicopter can descend safely even if the engine stops. Explains speed and control method for each phase (approach, glide, flare, landing), and energy adjustment to soften the impact at landing. Future improvements include automatic engine failure detection and enhanced safety measures.
Rafael Lehmkuhl Cockpit: An intuitive and customizable GCS

The features and functions of the new ground control station “Cockpit” developed by Blue Robotics were introduced. Cockpit is fully web-based and provides a highly customizable interface to meet the needs of the user. It supports multiple cameras and sonars, and can also control external devices using joystick operation and HTTP requests. In addition, by enabling flexible data input and seamless collaboration between devices, it is possible to create the optimal operating environment for each application.
Peter Hall Telemetry Dashboard

A demonstration of a telemetry dashboard that can be used in a web browser was given. This is not a GCS. It was demonstrated that widgets can be arranged by dragging and dropping to display various aircraft information (sensor values, graphs, HUD, etc.) in real time, and that the size and color can be changed. The audience asked questions such as whether it is possible to lock the widget position and whether it is possible to control the aircraft in chat format.
Ryan Freedman ROS2

ROS2 has many convenient functions for autonomous control, so the support for easily using them from ArduPilot was explained. There are MAVROS and MAVSDK as ways to handle ROS, but they alone cannot support everything, so individual support is also necessary. ArduPilot ROS2 support and examples were explained from the perspectives of compilation, building, control, navigation, simulation, and documentation. Specific functions currently supported, such as AP_Geoid, fixed-wing SmartRTL, and AP_ExternalControl, were also mentioned.
Randy Mackay Position Offsets

He explained the mechanism for suppressing vibration of the suspended load implemented for the Japan Innovation Challenge delivery mission. First, a GPS is installed on the suspended load to acquire position information and calculate the difference with the aircraft, and the aircraft is moved according to this difference to suppress shaking. This only works under certain conditions, such as when a payload placement mission is being carried out, and the difference information is cleared after three seconds have passed. During the Q&A session, a question was raised about the method of not attaching a GPS or tag to the payload, and Leonard joined in the discussion.
Bill Geyer System Identification WebTool
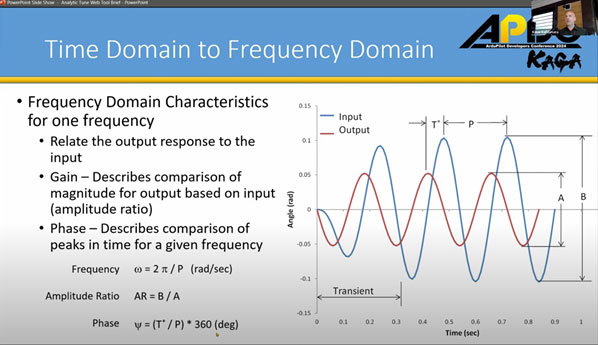
Describes how to tune helicopters and multirotors on your desktop. Shows tools that can predict ideal gain settings by conducting System ID flights and analyzing frequency response. Highlights the importance of noise and filter settings, especially the need to consider the effects of IMUs and hardware constraints.
Peter Hall, Matt Kear Closing remarks

He expressed his gratitude to Mr. Katsumata, Mr. Randy, the Drone Japan staff, Kaga City, the sponsors, the presenters, the demo presenters, and the hotel that provided the venue. The venue was filled with excitement when it was announced that next year’s Developer Conference will be held in Yorkshire, UK in September.