Day2 Schedule
8:00 Conference room open, check-in (bring your name tag from Day1)
8:30 Presentations (presenters should join zoom, mute and deafen their PCs)
- 8:30 Andy Piper・・・Copter Fast Rates
- 9:30 Bill Geyer・・・Copter Analytic Tune Web Tool (30 min)
- 10:00 Sanket Sharma・・・High Altitude Non-GPS
- 10:30 Patrick Pereira・・・MAVLink Tools: Tomorrow’s Solutions for Today’s Problems
- 11:00 Nathaniel Mailhot・・・Example of going from simulation to real flight of protoype plane.
- 11:30 Tim Tuxworth・・・Plane Follow
- 12:00 George Zogopoulos・・・Controller stability analysis
- 12:30 Thomas Watson (lightening talk)・・・ESP32 Status Update
- 13:00 Pieter Van Goor (ANU)・・・CINS (DCM replacement)
11:30 Bento lunch available (eat as you listen to presentations)
15:20 Leave for Kutani Dam
16:00 Demonstrations : Kutani Dam
18:00 Dinner Banquet at Hyakumangoku Hotel
Andy Piper Copter Fast Rates

Speeding up copter control. Overview of control principles, optimal rate control, rate requirements, rate output.
Comparison with BetaFlight, which is used especially in racing aircraft and freestyle, and application of ArduPilot. In the future, ArduPilot is likely to become an option not only for automation but also in situations where pilot response is required.
Bill Geyer Copter Analytic Tune Web Tool
A web-based analysis and adjustment tool. What is the ideal adjustment? Ultimately, the frequency domain is visualized to find the optimal settings. There was also an introduction to the theory that is important to keep in mind when tuning.
Sanket Sharma High Altitude Non-GPS
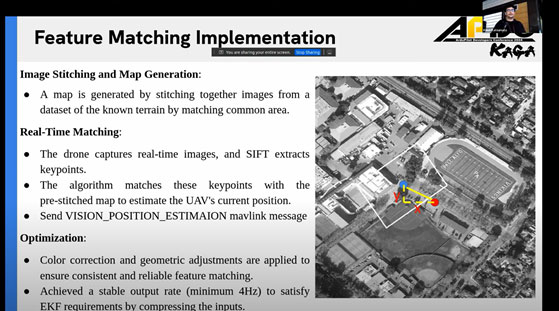
This technology allows drones to fly in places where GPS is not available. It has a mechanism to analyze images obtained from the drone’s camera in real time to determine its location, and automatically uses GPS when a GPS signal can be captured. AI instantly responds to changes in size, brightness, and distance, making it easy to perform highly accurate positioning.
Patrick Pereira MAVLink Tools: Tomorrow’s Solutions for Today’s Problems

Explanation of tools for MAVLINK. Many users use cameras and various tools. We created a GUI tool that can set up devices such as cameras, making it easy to set up even when multiple cameras are installed. In addition, the communication method is also applicable to Gstreamer and WebRTC, and it supports various protocols.
Nathaniel Mailhot
Example of going from simulation to real flight of prototype plane.
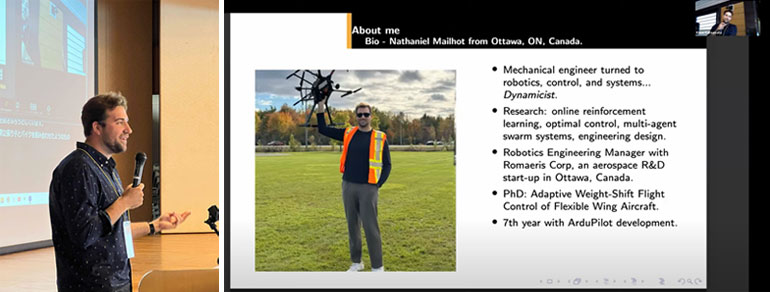
They have successfully performed autonomous flight of a prototype aircraft called uWSC. It can easily change direction by simply shifting the center of gravity like a motorcycle. By referring to avionics data obtained from manned aircraft, they have achieved dynamic stability with optimal balance. They said that they would like to realize the possibility of landing in the future.
Tim Tuxworth Plane Follow

They announced a drone that tracks airplanes. It tracks based on information from a camera, but by receiving signals from the airplane such as its rotation speed, it is also able to follow after it turns. It also makes real-time tracking possible by taking into account the time lag in image recognition.
George Zogopoulos Controller stability analysis
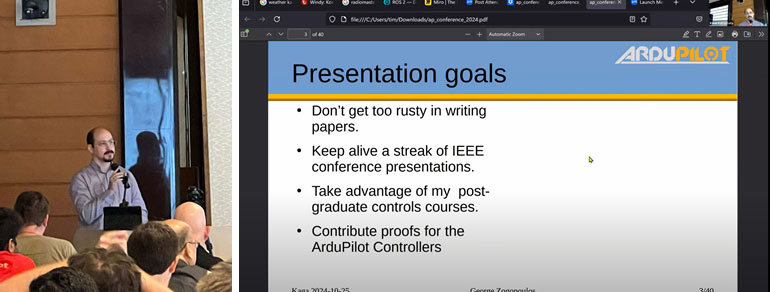
He presented a stability verification of the ArduPilot control system using nonlinear control theory. To confirm the stability of TECS, he analyzed the stability of the system using Lapunov functions and phase portraits, and confirmed stability under certain numerical conditions.
Pieter Van Goor (ANU) CINS (DCM replacement)
Complementary inertial navigation system. Complementing inertial systems with new geographic information. Difference between EKF and CINS. Introduction to tuning with CINS.